2. 快速开始¶
我们先通过一系列简单的例子,来对 Transaction DSL 有一个直观的认识。
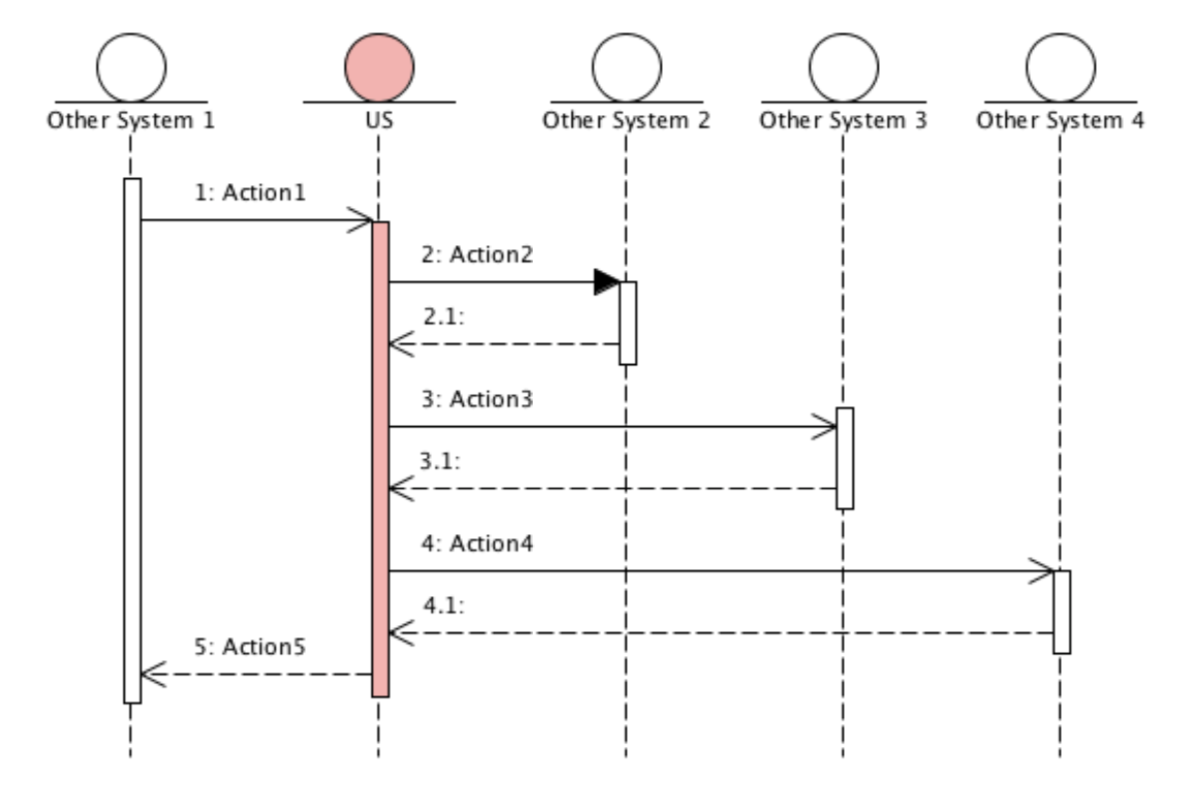
如图所示,站在 US 的角度,一个完整的事务操作,共分为 5 个步骤:
从 Other System 1 收到一条请求消息;
对 Other System 2 进行了一个函数调用;
对 Other System 3 发送了一条异步消息,并等待其应答消息;
对 Other System 4 发送了一条异步消息,并等待其应答消息;
给 Other System 1 发送了一条应答消息。
2.1. 定义事务¶
使用 Transaction DSL ,我们将上面序列图中的过程定义为:
__transaction (
__sequential
( __asyn(Action1)
, __sync(Action2)
, __asyn(Action3)
, __asyn(Action4)
, __sync(Action5))
);
这段代码定义了一个名为 Transaction 的事务。它由一个包含了 5 个步骤的 顺序操作 (Sequential Action)构成。
每个步骤都是一个 基本操作 (Atom Action)。
基本操作 共分为两类: 同步操作 ( Synchronous Action )和 异步操作 ( Asynchronous Action )。
任何无需进一步等待后续消息的 Action ,都称作 同步操作 。这包括:函数调用,以及只发消息、不等回应的操作。
它们都需要通过 __sync 来指明。但为了更加清晰的区分究竟一个同步操作属于哪种具体类型,你可以使用 __call 来说明一个操作是函数调用,
用 __ind 来说明这是一个发送指示消息的操作,用 __rsp 来说明一个操作是对之前某个请求的一个应答。
任何需要等待异步消息的操作,都称作 异步操作 。这包括:典型的 请求——应答 操作,消息触发的操作等。
而异步操作则需要通过 __asyn 来说明。同样的,你可以使用其它一些更加具体的修饰来明确一个异步操作的类型。
比如:你可以使用 __req 来说明这是一个消息触发型的请求操作。
另外,由于 __transaction 可以直接识别其内部结构是否是一个 __sequential ,所以 __sequential 可以被省略。
所以,之前的例子可以修改为:
__transaction
( __req(Action1)
, __sync(Action2)
, __asyn(Action3)
, __asyn(Action4)
, __rsp(Action5));
现在,我们可以看出,这段代码是对上述序列图简单而直接的描述。
2.2. 定义基本操作¶
为了让上述代码可以工作,你需要实现其中的基本操作。事实上,无论一个事务有多么复杂,最终总是由基本操作组成, 你需要做的事情就是定义这些基本操作,然后使用 Transaction DSL 来描述它们运行的方式和顺序。
我们之前已经提到,基本操作分为两种: 同步操作 和 异步操作 。定义它们时需要实现带有如下方法的类。
auto exec(TransactionInfo const&) -> Status;
auto exec(TransactionInfo const&) -> Status;
auto handleEvent(TransactionInfo const&, Event const&) -> Status;
auto kill(TransactionInfo const&, Status cause) -> void;
对于 同步操作 ,你需要做的就是定一个原型为 Status (const TransactionInfo&) 的函数。
如果你通过类来定一个同步操作,你需要做的就是在你的类中定义一个名为 exec 的方法。
对于函数调用型的同步操作,其实现非常简单,其返回值为 SUCCESS 代表此操作成功,如果返回错误值则表示此操作失败。
auto Action2(TransactionInfo const&) -> Status {
return OtherSystem::func();
}
甚至可以是一个 lambda :
auto Action2 = [](TransactionInfo const&) -> Status {
return OtherSystem::func();
}
对于 Action5 ,尽管它发送了消息,却无需等待任何消息,所以它也是一个 同步操作 。
虽然也可以直接用函数直接定义,但基于举例的目的,这次我们用类来定义它:
struct Action5 {
auto exec(TransactionInfo const&) -> Status {
// 构建并发送消息
Response1 response;
response.build();
return sendResponseTo(OTHER_SYSTEM1_PID, response);
}
};
而对于 异步操作 ,存在一些常用的模式。大多数情况下,你可以根据模式从已存在的基类中继承。
比如:如果一个异步操作属于简单的 请求-应答 模式,你只需要从 SimpleAsyncAction 继承即可。
DEF_SIMPLE_ASYNC_ACTION(Action3) {
auto exec(TransactionInfo const&) -> Status {
// 构建并发送请求消息
Request3 request;
request.build();
Status status = sendRequestTo(OTHER_SYSTEM3_PID, request);
if(status != SUCCESS) return status;
// 声明自己要等待的应答消息类型,以及对应的处理函数;WAIT_ON会返回CONTINUE
return WAIT_ON(EV_ACTION3_RSP, handleAction3Rsp);
}
private:
// 定义事件处理函数
auto handleAction3Rsp(TransactionInfo const&, Event const& event) -> Status {
// 处理应答消息
handleRsp(event);
// 返回成功,代表此 Action 成功处理结束
return SUCCESS;
}
};
而 Action1 则属于一个事件触发的操作,所以它不发送消息,只等待那么触发消息。但它仍然可以继承自 SimpleAsyncAction 。
DEF_SIMPLE_ASYNC_ACTION(Action1) {
auto exec(TransactionInfo const&) -> Status {
// 声明自己要等待的消息类型,以及对应的处理函数
return WAIT_ON(EV_ACTION1_REQ, handleAction1Req);
}
private:
// 定义事件处理函数
auto handleAction1Req(TransactionInfo const&, Event const& event) -> Status {
// 处理触发消息
handleReq(event);
// 返回成功,代表此 Action 成功处理结束
return SUCCESS;
}
};
对于 异步操作 的所有函数,其返回值有三种: SUCCESS 表示此操作成功结束; CONTINUE 表示此操作尚未结束,需要进一步的处理;
错误值 则表示此操作已经失败。
而函数 handleEvent 则存在一种额外的返回值: UNKNOWN_EVENT ,说明当前消息不是自己期待的消息。
返回值 |
语意 |
|---|---|
|
Action 成功结束 |
|
Action 仍然在工作 |
|
Action 收到一个未期待的消息 |
错误码 |
Action 失败,并已经中止 |
2.3. 约束¶
用户自定义的基本操作,如果通过类来定义, Transaction DSL 要求它们必须是自满足的。
即,它们不需要外部通过 构造函数 或 set 函数设置任何外部依赖。所有的依赖,都需要靠类自身到环境中亲自寻找,或亲自创建。
所以,这些类必须存在 默认构造函数 。至于其它带参数的 构造函数 或 set 接口,虽然其存在并不会妨害 Transaction DSL
的编译和运行,但它们永远也不会得到调用。
这样的约束,并不会对设计造成任何妨害。因为这些类本来就靠近系统的边界。而边界的代码本身就应该承担寻找或创建目标对象的职责。
2.4. 运行¶
现在我们有了 Transaction,有了基本操作,一个事务就完整了。由于 Transaction 是一个事件驱动的组件。它的基本接口定义如下:
auto start() -> Status;
auto start(Event const& event) -> Status;
auto handleEvent(Event const& event) -> Status;
auto stop(Status cause) -> Status;
auto kill(Status cause) -> void;
所以,你可以选择任何一个 start 接口来启动一个事务。像一个异步操作一样, 如果其返回值是 SUCCESS ,
说明此事务已经成功的执行;如果其返回值是一个 错误值 ,则说明此事务已经失败;
而如果其返回了 CONTINUE ,则说明此事务正在工作状态中,尚未结束,仍然需要进一步的消息激励。
在 start 接口返回 CONTINUE 的情况下,随后每次系统收到一个消息,都需要
调用其 handleEvent 接口,直到其返回 SUCCESS 或一个 错误值 为止。
一个可能的实现如下所示:
auto runTransaction() -> Status {
// 将之前定义的 Transaction 实例化 Transaction trans;
// 启动
auto status = trans.start();
if(status != CONTINUE) return status;
// 消息处理循环
while(recvEvent(event) == SUCCESS) {
status = trans.handleEvent(event);
if(status != CONTINUE && status != UNKNOWN_EVENT) {
return status;
}
}
return FAILED;
}
这个实现是一种简单的处理,主要为了说明一个事务的运行方式。事实上,事务往往不是一个系统的顶层框架, 一个事务仅仅是对一个处理过程的描述。在复杂系统中,事务与事务之间可以并发,可以抢占。 但那是事务框架之外的事情。在这里我们就不在详细讨论。
2.5. 并发¶
一旦系统因为性能要求,需要同时给不同其它系统/子系统发出请求消息,并同时等待它们的应答,如图所示。
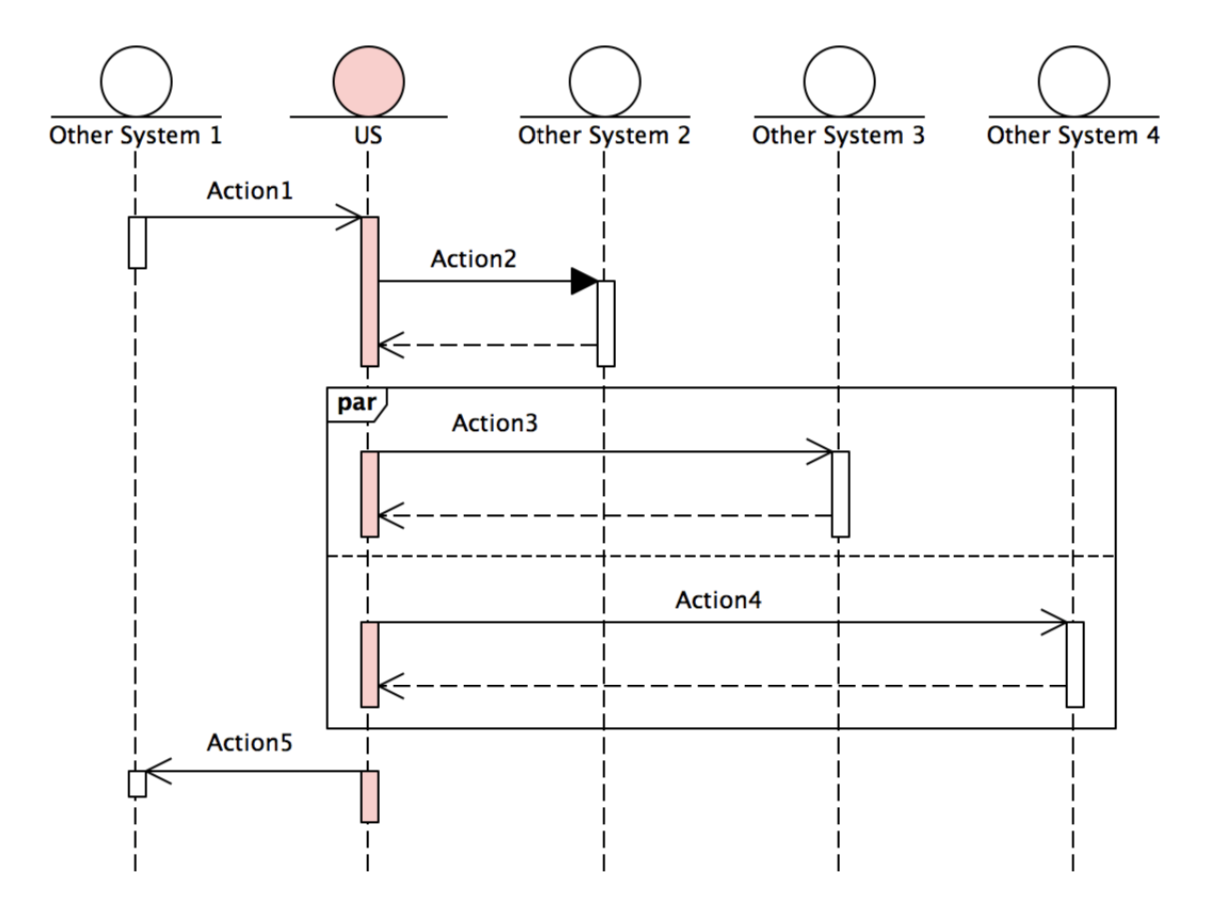
在这个例子中, Action3 和 Action4 同时给各自的目标系统发出请求消息,并各自等待应答。
这种情况下,简单的策略已经无法处理,实现者仍然不得不回到状态机模型中。
使用 Transaction DSL ,一个并发过程的定义非常简单,如下所示:
__transaction
( __req(Action1)
, __sync(Action2)
, __concurrent(__asyn(Action3), __asyn(Action4))
, __rsp(Action5));
我们只需要将 Action3 和 Action4 放入一个叫做 __concurrent 的盒子里即可。
它会保证两者可以得到并发的执行,并发的等待应答,并确保,只有在 Action3 和 Action4 都执行结束后,才会执行 Action5 。
哦…事实上,最后这条不是它单独保证的,因为 __concurrent 这个盒子放在了更大的盒子 __sequential 里面,
在 __sequential 看来,它里面有四个操作:分别是 Action1 , Action2 , __concurrent 和 Action4 ,
它会来保证这四个操作严格的按照顺序来执行。
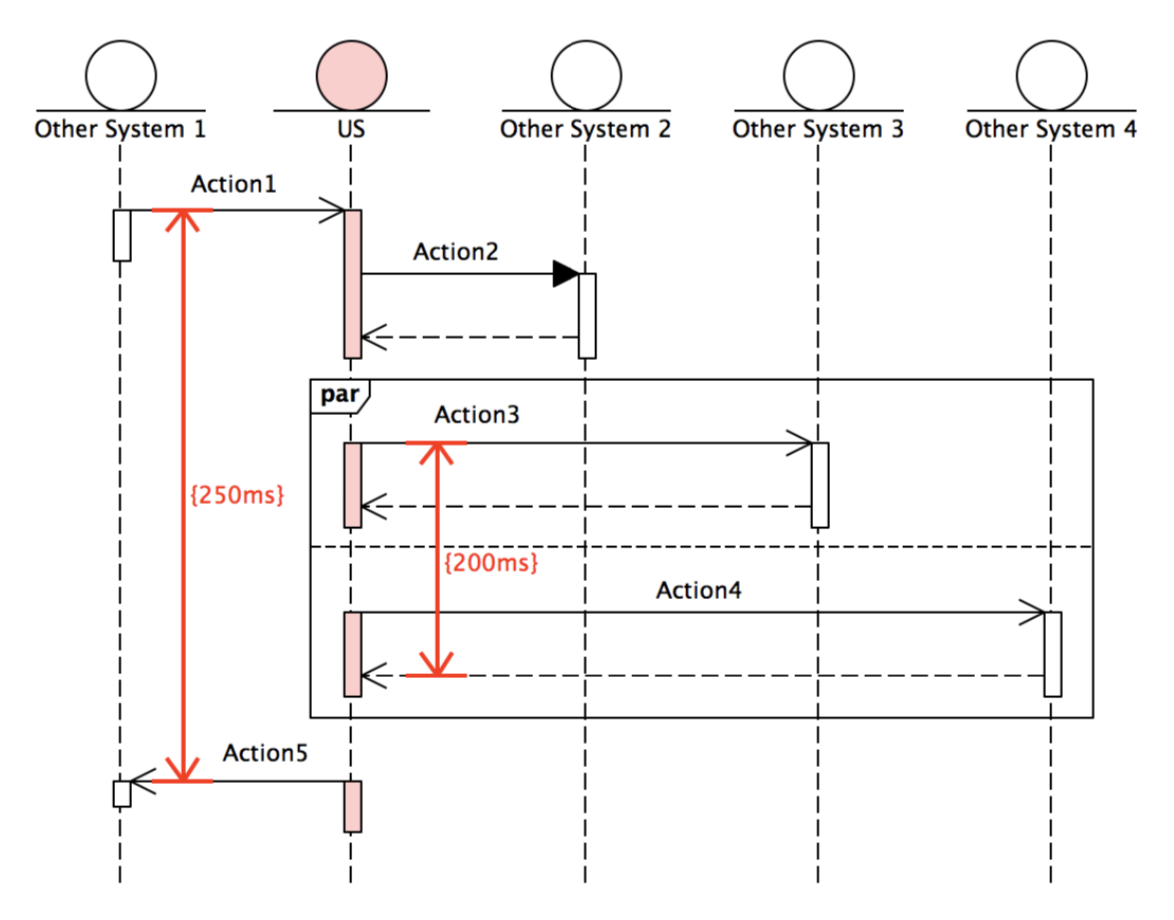
2.6. 时间约束¶
既然是异步系统,那么发出去的消息就有可能由于各种原因而一去无回;或至少,很晚才回来。 为了避免系统被这样的情况挂死,或者不满足实时性要求,设计者往往会对异步过程有着时间的约束;即在一定时间之内,如果一个操作无法完成, 则当前操作就失败。
下图所示的过程就属于这样的情况。其中,存在两个时间约束:首先,整个操作必须在 250ms 之内完成,而其中的并发异步过程则必须
在 200ms 之内完成。
我们将这个带有时间约束的事务描述如下:
const TimerId TIMER_1 = 1;
const TimerId TIMER_2 = 2;
__transaction
( __time_guard
( TIMER_1
, __req(Action1)
, __sync(Action2)
, __time_guard(TIMER_2, __concurrent(__asyn(Action3), __asyn(Action4)))
, __rsp(Action5))
);
2.6.1. 母语言¶
在这段代码里,我们首先定义了两个 TimerId : TIMER_1 和 TIMER_2 。其定义的方式是 C++ 的常量。
为什么这里可以使用 C++ 的语法?
是的,Transaction DSL 本身是就是 C++ 的代码,它可以被任何成熟的 C++ 编译器编译。 它是 C++ 代码这个事实,让它可以在需要时,使用任何 C++ 的元素。
2.6.2. 母语法¶
它采取的语法形式非常接近于 Lisp ,除了两点较大的差别:
Lisp 将一个 list 的名字放在括号内;
Lisp 一个 list 内的各个元素之间无需逗号分割。
如果你以前没有接触过 Lisp 语言,可通过下面一段 Lisp 的例子代码获取直观的印象。
(defun find-books (towns)
(if (null towns) nil
(let ((shops (bookshops (car towns))))
(if shops (values (car towns) shops)
(find-books (cdr towns))))))
无论你是否喜欢 Lisp 语言的语法形式,但对于我们的问题,这已经是我所能找 到的 C++ 元编程的最好表现形式。 但两者相似的地方不仅仅是语法形式,更重要的在于其背后的 元模型 。对于 Lisp 语言而言,一切都是 List , 所以,它本身就在表述一颗 语法树 。
而对于 Transaction DSL 而言,一切都是 Action , 它本身就在表述一颗 Action Tree ,在这颗树上,每一个节点所代表的子树都是一个 Action 。 而在叶子节点,就是用户所定义的 同步 或 异步 的 Action (操作)。
2.6.3. Timer ID¶
你已经看到,我们并没有在 Transaction 中直接写 200ms 或 250ms ,而是使用了 Timer ID 。
将时间约束的数值直接写在 Transaction 里,从实现上并无难度,但是,这将导致用户将失去运行时修改它的能力。 而用户很有可能希望某些时间约束是可配置的,从而在运行时是可修改的。
所以,我们需要定义一个标识来定义这个约束,然后,Timer 管理器会将这个 TimerID 和某项配置关联起来 (你当然也可以 hard coding 将其写死)。
另外,无论 Transaction DSL 被移植到什么平台上,都必须要满足:
在 Timer 过期时,必须发送一条消息出来;
Timer 的实现必须能够将
Timer ID和 Timer 过期消息之间建立起一一映射关系。 而这一切,在我所见过的各种 Timer 机制中,都不难实现。
2.6.4. 同步操作的时间约束¶
虽然你可以在一段 Transaction DSL 代码中,对一个同步操作进行时间约束,但事实上,这个约束形同虚设。
这是因为,一旦进入一个 同步操作 的执行,事务框架就失去了控制权。所以,它无法在定时器过期时,抢占或打断一个同步操作的执行。
而 异步操作 则不同,由于它们需要等待消息激励,在等待期间,事务掌握着控制权,当收到其定时器过期消息时,事务可以马上中止其运行。
2.7. 回到最初¶
现在,我们可以使用 Transaction DSL 来对我们最初的过程进行描述:
__transaction
( __asyn(ApplicationAcceptance)
, __concurrent
( __asyn(BackgroundInvestigation)
, __sequential
( __asyn(Exam)
, __asyn(Interview)))
, __asyn(OfferNegotiation)
, __time_guard(TIMER_ONBOARD, __asyn(OnBoard))));
剩下的事情,就是把每一个 基本操作 进行实现,而它们都是非常简单,原子级别的交互过程。
2.8. 优势¶
在本章中,我们初步了解了如何使用 Transaction DSL 来定义一个异步过程。 即,实现 原子操作 :分为 同步 和 异步 两种。 然后通过 Transaction DSL 来描述这些 基本操作 的执行方式。
通过这些例子,我们可以看到 Transaction DSL 的一些主要优势:
- 直观:
Transaction DSL 的描述,和 UML 序列图的描述有着明确直观的映射关系。设计和实现之间的 gap 被大大缩小。
- 简单:
没有复杂的事无巨细的状态机,没有重复繁琐的定时器操作,没有亲力亲为的并发过程控制——开发这些代码是一个无趣的, 重复的,容易出错的,给开发和维护都带来大量成本过程。
不过你仍然需要写一些代码——那就是——将序列图没有冗余的描述一次。 但…please…不要告诉我, 你打算开发一个图形界面,将 UML 序列图自动转化为 Transaction DSL ,这样就可以连这些代码也不用写了。
毫无疑问,这将是一笔极其糟糕的投资,你应该将你过剩的精力花在真正有价值的事情上。
- 事务与操作的分离:
到目前为止,你可能已经注意到,虽然我们的例子从最初的简单顺序执行,到后来改变为并发执行,最后,我们又增加了时间约束, 但我们却没有修改基本操作的一行代码。我们只是在修改事务的代码——以一种非常简单、快速的方式。
- Native Language:
Transaction DSL 本身就是 C++ 代码,这就意味着它可以和 C++ 的其它代码元 素自由地结合使用,与其它 C++ 代码进行无缝配合。
- 图灵完备:
随着后续章节的介绍,你就可以发现, Transaction DSL 是图灵完备的。也就是说它可以解决一切图灵可计算问题。